
Δ系统 (Δ-system) 引理
主要内容介绍了 $\Delta\text{-system}$ 这种特殊的集簇, 以及 $\Delta\text{-system lemma}$ 的证明.
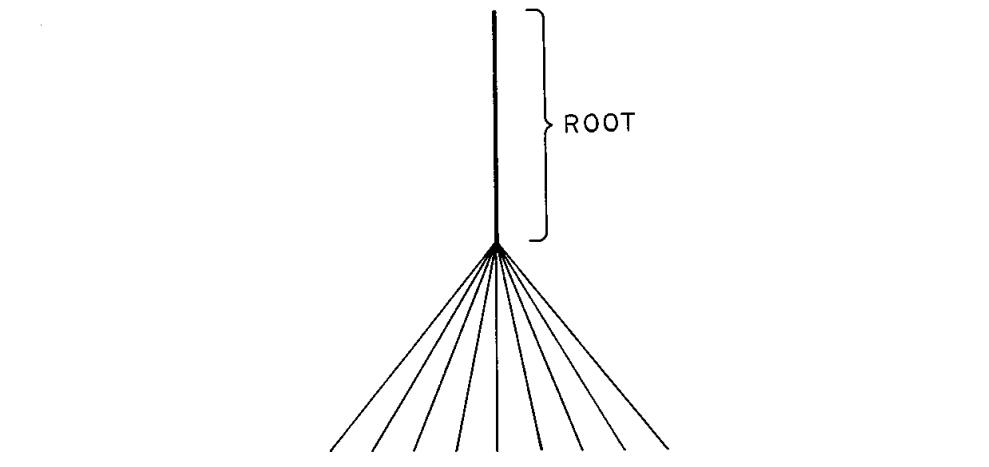
简单介绍如果一个集簇 $\mathscr{A}$ 满足 $\forall x,y\in \mathscr{A}(x\cap y=r)$ , $r$ 是某个确定的集合, 那么这个集簇就叫做 $\Delta\text{-system}$ , $r$ 叫做这个 $\Delta\text{-system}$ 的根.
$\Delta\text{-system lemma}$令 $\kappa$ 是某个不可数基数, 若正则基数 $\theta>\kappa$ 且满足 $\forall \alpha
基数乘法的不变性
主要内容本文主要证明了当基数 $\kappa\geqslant\omega$ , 那么有 $\kappa \oplus \kappa=\kappa, \kappa \otimes \kappa=\kappa$ .
简单介绍这是一个重要的集合论定理, 无论是基数的幂 ($\alpha^\alpha$) 还是不可数集的不可数交, 都可以用这个定理导出.
定义基数乘法和加法:
$\kappa\oplus\gamma=|\kappa\times\{0\}\cup\gamma\times\{1\}|$ ,
$\kappa\otimes\gamma=|\kappa\times\gamma|$
# 证明
我们可以先证明基数加法, 即 $\kappa\geqslant\omega$, $\kappa\oplus\kappa=\kappa$ . 我们将使用超限归纳法. 命题等价于对于任意序数 $\alpha$ 都有 $|\alpha|\oplus|\alpha|=|\alpha|$ 对于某个序数 $\alpha\geqslant\omega$ , 若任意 $\beta
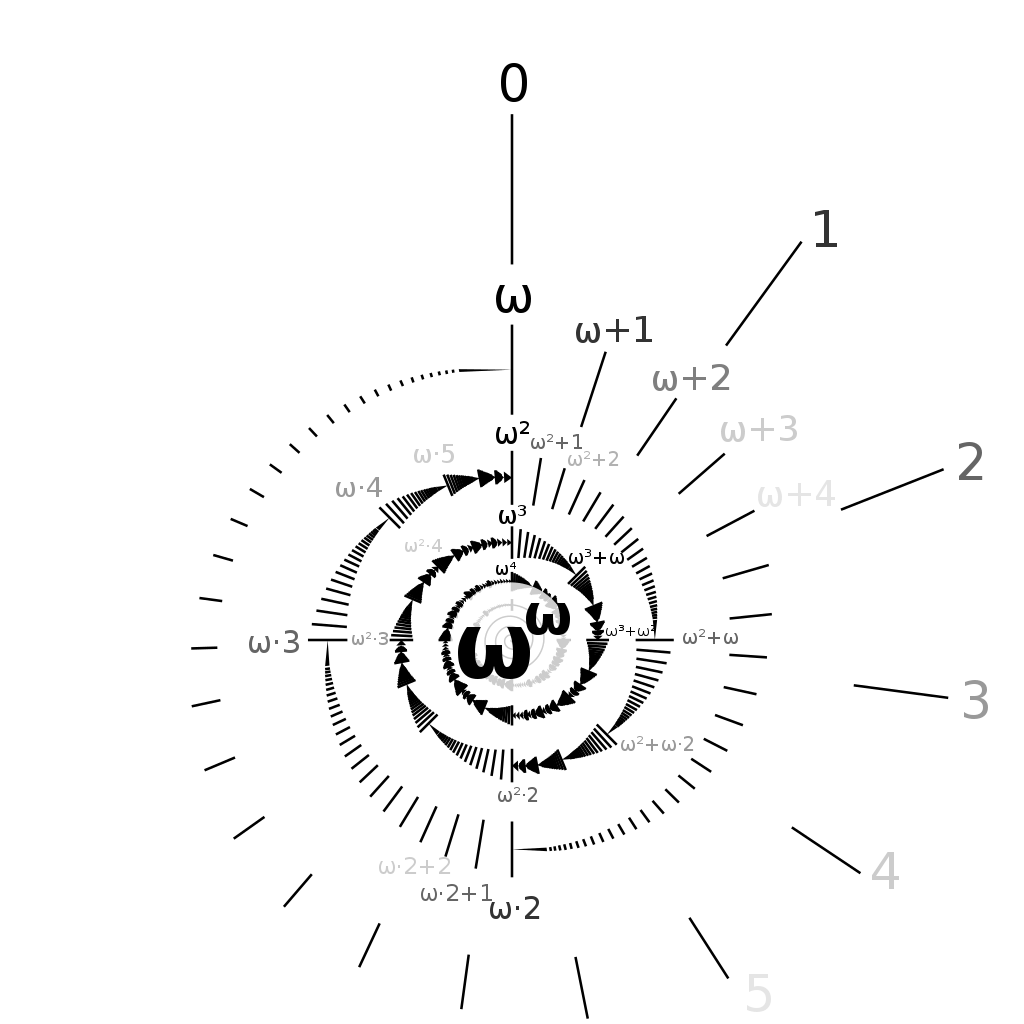
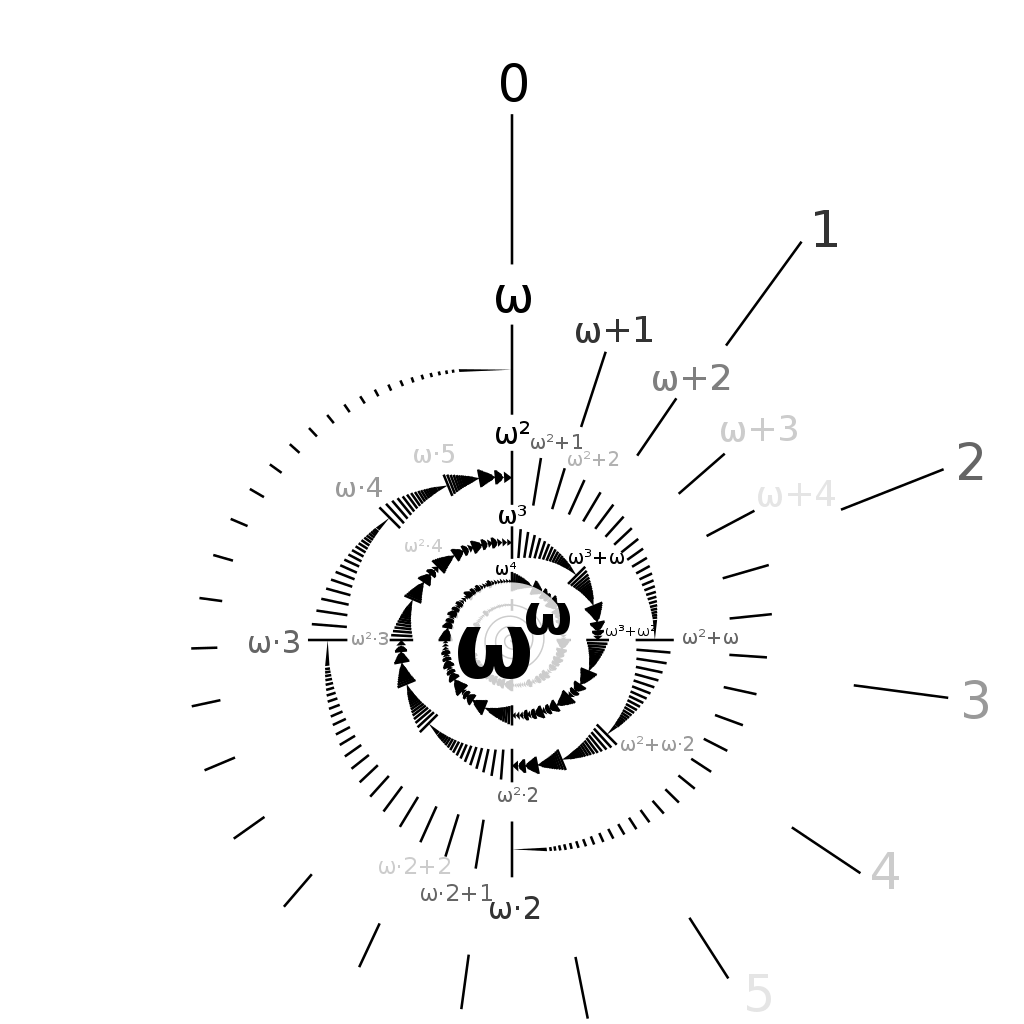
序数的唯一性
主要内容本文主要证明了序数的唯一性, 即若序数 $O_1 \cong O_2$ , 则有 $O_1=O_2$ , $\cong$ 是同构的意思.
简单介绍序数是指一类集合, 满足:
可传递性, 即其元素也是其子集.
通过 $\in$ 关系构成良序集.
定义定义 $0=\{\}$ , 即 $0$ 是空集.
证明引理 1. 对于某个序数 $O\not=0$, 一定有 $0\in O$.
证明: 任取 $x\in O$, 若 $x\not=0$ , 则取 $x'$ 为 $x\cap O$ 的最小元, 易得 $x'=0$ , 否则可取 $x''\in x'$ , 即可得出 $x''\in x\cap O$ , 与 $x'$ 为最小元矛盾.$\quad\blacksquare$
引理 2. 记 $f\colon A\to B$ 为 $O_1$ 与 $O_2$ 之间保持结构的双射, 有 $f(0)=0$.
证明: 设 $f(0)=x\in O_2$, 若 $x\not=0$, 则有 $0\in O_2$ , 这说明 $f^{-1}(0)\in0$ , 这是不可能的.$\quad\blac ...
(史济怀) 数学分析教程上册第 3 版-练习题 3.1
1$$
f'(0)=\lim_{x\to 0}\frac{f(x)-f(0)}{x-0}=\lim_{x\to0}\frac{f(x)}{x}
$$
2$\frac{f(b_n)-f(a_n)}{b_n-a_n}$ 必然夹在 $\frac{f(b_n)-f(0)}{b_n-0}$ 与 $\frac{f(a_n)-f(0)}{a_n-0}$ 之间
由夹逼定理可知,
$$
\lim_{n\to\infty}\frac{f(b_n)-f(a_n)}{b_n-a_n}=f'(0)
$$
7$$
\begin{aligned}
&\lim_{n\to\infty}\left(\frac{f(a+1/n)}{f(a)}\right)\\
=&1+\lim_{n\to\infty}\left(\frac{f(a+1/n)-f(a)}{f(a)}\right)\\
=&1+\lim_{n\to\infty}\left(\frac{f(a+1/n)-f(a)}{1/n}\right)\lim_{n\to\infty}\left(\frac{1/n}{f(a)}\right)\\
=&1+f'(a)\c ...
(史济怀) 数学分析教程上册第 3 版-练习题 2.11
2这说明存在 ${x^*}_n\to {x_0}^-,x_{*n}\to {x_0}^-$ , 使得 $f({x^*}_n)\to\mathop{\lim\sup}_{x\to {x_0}^-}f(x), f({x_*}_n)\to\mathop{\lim\inf}_{x\to {x_0}^-}f(x)$ . 根据介值定理在 $n0$ 都有 $x\in A$ 使得 $\sup A\geqslant x>\sup A-\epsilon$ , 这说明我们可以在 $A=\{f(x)\colon 0
(史济怀) 数学分析教程上册第 3 版-练习题 2.10
1假设是无界的, 那么由本节前面内容可推出 $\lim_{x\to a}f(x)=\infty$ 或 $\lim_{x\to b}f(x)=\infty$ . 由一致连续的定义可推出矛盾.
2如果是有限区间, 有$$
f(a) + g(a)=\lim_{x\to a}f(x)+\lim_{x\to a}g(x)=\lim_{x\to a}f(x)+g(x)
$$说明 $f(a)+g(a)$ 是连续的. 如果是开区间只需补充两边定义即可成为闭区间, 而由该节内容可知闭区间中的连续函数必然一致连续.
如果是无穷区间, 就不一定成立, 比如 $f(x)=g(x)=x$ .
3补充定义, 然后和上一题有限区间情况类似.
4由题目可得, 对于任意的 $\epsilon/4>0$ 存在 $b>0$ , 使得当 $x\geqslant b$ 时, 有 $|f(x)-f(+\infty)|b$ 时, 有
$|f(x_1)-f(x_2)|0$ , 若 $x_1, x_2>b$ , 那么 $\delta$ 取多大都可以, 若 $x_1,x_2\in[a,b]$ , 由于本来就是一致连续, 对应的 $\de ...
(史济怀) 数学分析教程上册第 3 版-练习题 2.9
3由一致连续的定义知, 对于 $\epsilon>0$ , 存在 $\delta>0$ , 使得 $|f(x)-f(x\pm\delta)|
(史济怀) 数学分析教程上册第 3 版-练习题 2.8
2(1)等价于$$
\begin{aligned}
&\lim_{x\to1}\frac{x^n-1}{x^m-1}\\
=&\lim_{t\to0}\frac{(t+1)^n-1}{(t+1)^m-1}\\
=&\lim_{t\to0}\frac{t^n+nt+o(t)}{t^m+mt+o(t)}\\
=&\lim_{t\to0}\frac{t^{n-1}+n+o(1)}{t^{m-1}+m+o(1)}\\
=&\frac{n}{m}
\end{aligned}
$$
(2)令 $1+\alpha x=t^m$ 可得$$
\lim_{t\to 1}\frac{\alpha(t-1)}{t^m-1}=\frac{\alpha}{m}
$$
(3)$$
\lim_{x\to0}\frac{\sqrt[m]{1+\alpha x}-\sqrt[n]{1+\beta x}}{x}=\lim_{x\to0}\frac{\sqrt[m]{1+\alpha x}-1}{x}-\lim_{x\to0}\frac{\sqrt[n]{1+\beta x}-1}{x}=\frac{\alpha}{m}-\ ...
(史济怀) 数学分析教程上册第 3 版-练习题 2.7
1(1)不能, 在 $0$ 处 $f$ 极限不存在.
(2)$x=0$ 处无定义, 但是在 $x=0$ 处有可去间断点, 因此如果补充定义, 那么该函数的定义域就是 $\mathbb{R}$ .
## (3)
是. 这等价于连续的定义.
## (4)
不能. $x_0$ 处不一定有定义, 且 $f(x_0)$ 的值无法从给定的公式计算 (也就是无关) .
## (5)
由题意知
$$
f(x_0)=\lim_{x\to x_0}f(x)=0
$$
4(1)不连续.
(2)不一定.
5 这说明
$$
f(x_0)=\lim_{x\to x_0}f(x)
$$
即$$
|f(x)-f(x_0)|
(史济怀) 数学分析教程上册第 3 版-练习题 2.6
2(1)由极限的加法可得.
(2)由极限的乘法可得.
(3)由极限的乘法可得.
(4)只需证明
$$
\frac{1}{1+\alpha}+\alpha-1=o(\alpha)
$$
这等价于$$
\lim_{x\to x_0}\frac{\alpha}{1+\alpha}=0
$$
这是显然的.